LMEC-7 Péndulo de Pohl
LMEC-7El péndulo de Pohl
Experimentos
1. Oscilación libre: medición de la correspondencia entre la amplitud del volante θ y el período de oscilación libre T
2.Determinación del factor de amortiguamiento β.
3.Determinación de la característica amplitud-frecuencia y de las curvas características fase-frecuencia de vibraciones forzadas.
4.Estudio del efecto de diferentes amortiguamientos sobre vibraciones forzadas y observación de fenómenos de resonancia.
5.Aprenda a utilizar el método estroboscópico para determinar ciertas cantidades de objetos en movimiento, como las diferencias de fase.
Especificaciones principales
| Factor K de terquedad primaveral | Menos del 2% de cambio en el período de vibración libre |
| Medición del tiempo | Precisión 0,001 s, error de medición del ciclo 0,2 % |
| péndulo mecánico | con ranuras de indexación, indexación 2°, radio 100 mm |
| Medición de amplitud | error ±1° |
| Sensor fotoeléctrico A | detección de señales fotoeléctricas dobles |
| sensor fotoeléctrico B | detección de señales fotoeléctricas individuales |
| Rango de velocidad del motor (frecuencia de forzamiento) | 30 – 45 rpm y ajustable continuamente |
| Inestabilidad de la velocidad del motor | Menos del 0,05%, lo que garantiza un ciclo de prueba estable |
| Amortiguación del sistema | menos de 2° por caída de amplitud |
Detalles
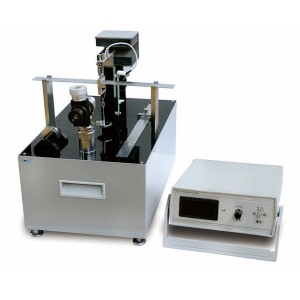
Componentes del sistema: Dispositivo experimental de resonancia Pohl, controlador experimental de resonancia Pohl, conjunto de flash independiente, 2 sensores fotoeléctricos (uno de cada tipo A y otro de tipo B)
Configuración experimental de resonancia de Pohl.
1. Factor de tenacidad del resorte K: menos del 2 % de cambio en el período de vibración libre.
2. Medición de tiempo (10 ciclos): precisión 0,001 s, error de medición de ciclo 0,2 %.
3. Amortiguación del sistema en ausencia de amortiguamiento electromagnético: menos de 2° por caída de amplitud.
4. Péndulo mecánico: con ranuras de indexación, indexación 2°, radio 100 mm.
5. Medición de amplitud: error ±1°; método de medición de amplitud: detección fotoeléctrica.
6. Sensor fotoeléctrico A: detección de señales fotoeléctricas dobles; sensor fotoeléctrico B: detección de señales fotoeléctricas simples.
7. Rango de velocidad del motor (frecuencia de forzamiento): 30 – 45 rpm y ajustable continuamente.
8. Inestabilidad de la velocidad del motor: menos del 0,05%, lo que garantiza un ciclo de prueba estable.
9. Determinación de la diferencia de fase.
Dos métodos de determinación de diferencia de fase: estroboscópico y metrológico, con una desviación inferior a 3° entre ambos métodos.
El rango de medición del método metrológico está entre 50° y 160°.
Rango de medición estroboscópica entre 0° y 180°; desviación de medición repetida <2°.
10. Flash: unidad de bajo voltaje, flash separado de la unidad experimental, tiempo de flash continuo de 2 ms, color rojo llamativo.
11. Bajo nivel de ruido, sin perturbaciones ni molestias durante los experimentos grupales.
Controlador experimental de resonancia Pohl.
1. Se utiliza un controlador experimental especial para recopilar y mostrar datos; se utiliza una gran pantalla LCD de matriz de puntos, con menús para guiar el experimento, tomar notas (manual de instrucciones electrónico) y mostrar y verificar datos experimentales.
2. Interfaz de control dedicada para luces estroboscópicas.